#include <ArAction.h>
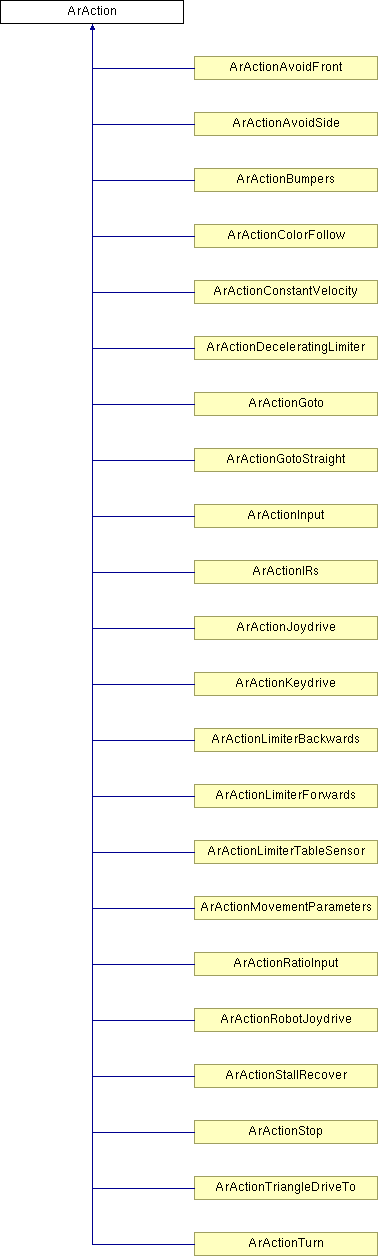
Inheritance diagram for ArAction:
Public Member Functions | |
| virtual void | activate (void) |
| Activate the action. | |
| ArAction (const char *name, const char *description="") | |
| Constructor. | |
| virtual void | deactivate (void) |
| Deactivate the action. | |
| virtual ArActionDesired * | fire (ArActionDesired currentDesired)=0 |
| Fires the action, returning what the action wants to do. | |
| virtual ArArg * | getArg (int number) |
| Gets the numbered argument. | |
| virtual const ArArg * | getArg (int number) const |
| Gets the numbered argument. | |
| virtual const char * | getDescription (void) const |
| Gets the long description of the action. | |
| virtual ArActionDesired * | getDesired (void) |
| Gets what this action wants to do (for display purposes). | |
| virtual const char * | getName (void) const |
| Gets the name of the action. | |
| virtual int | getNumArgs (void) const |
| Find the number of arguments this action takes. | |
| virtual bool | isActive (void) const |
| Finds out whether the action is active or not. | |
| virtual void | log (bool verbose=true) const |
| ArLog::log s the actions stats. | |
| virtual void | setRobot (ArRobot *robot) |
| Sets the robot this action is driving. | |
| virtual | ~ArAction () |
| Desructor. | |
Protected Member Functions | |
| void | setNextArgument (ArArg const &arg) |
| Sets the argument type for the next argument (only use in constructor). | |
Protected Attributes | |
| std::map< int, ArArg > | myArgumentMap |
| std::string | myDescription |
| bool | myIsActive |
| std::string | myName |
| int | myNumArgs |
| ArRobot * | myRobot |
Definition at line 39 of file ArAction.h.
|
|
Fires the action, returning what the action wants to do.
Implemented in ArActionAvoidFront, ArActionAvoidSide, ArActionBumpers, ArActionColorFollow, ArActionConstantVelocity, ArActionDeceleratingLimiter, ArActionGoto, ArActionGotoStraight, ArActionInput, ArActionIRs, ArActionJoydrive, ArActionKeydrive, ArActionLimiterBackwards, ArActionLimiterForwards, ArActionLimiterTableSensor, ArActionMovementParameters, ArActionRatioInput, ArActionRobotJoydrive, ArActionStallRecover, ArActionStop, ArActionTriangleDriveTo, and ArActionTurn. |
 1.4.0
1.4.0